Contextual Safety Reasoning and Grounding for Open-World Robots
标题:Contextual Safety Reasoning and Grounding for Open-World Robots#
作者:Zachary Ravichandran1, David Snyder1, Alexander Robey2, Hamed Hassani1, Vijay Kumar1, and George J. Pappas
出版年份:24 Feb 2026
机构 1University of Pennsylvania, 2Carnegie Mellon University
链接:https://arxiv.org/pdf/2602.19983
📜 Abstract#
Task: #
开放环境的安全导航策略。
提出一种无需事先了解环境(例如地图或安全规范)即能实现在线上下文推理、落地(grounding)和强制执行的安全框架。
Technical challenge for previous methods (围绕我们解决了的technical challenge展开讨论)#
现有方法#
安全方面:通过控制屏障函数(cbf) 可达性分析 执行
但是安全规范必须由专家用户定义,并且需要完全事先了解机器人所处的环境,这使得它们在复杂的开放世界场景中难以广泛应用。
已知动态环境操作→侧重于几何层面的安全性而非语境层面的安全性[7-9]
自然语言描述安全规则转化为安全集
技术challenge:(为什么难)#
机器人仍然无法自行推理安全性。→ 对环境和安全理解不足以构建安全规则
- 从视觉观察难以推断安全内容
- 将安全约束如何映射至空间无需先验地图
- 推理和定位都有概率性,如何将其传递至控制输入(概率性建模)
一句话pipeline#
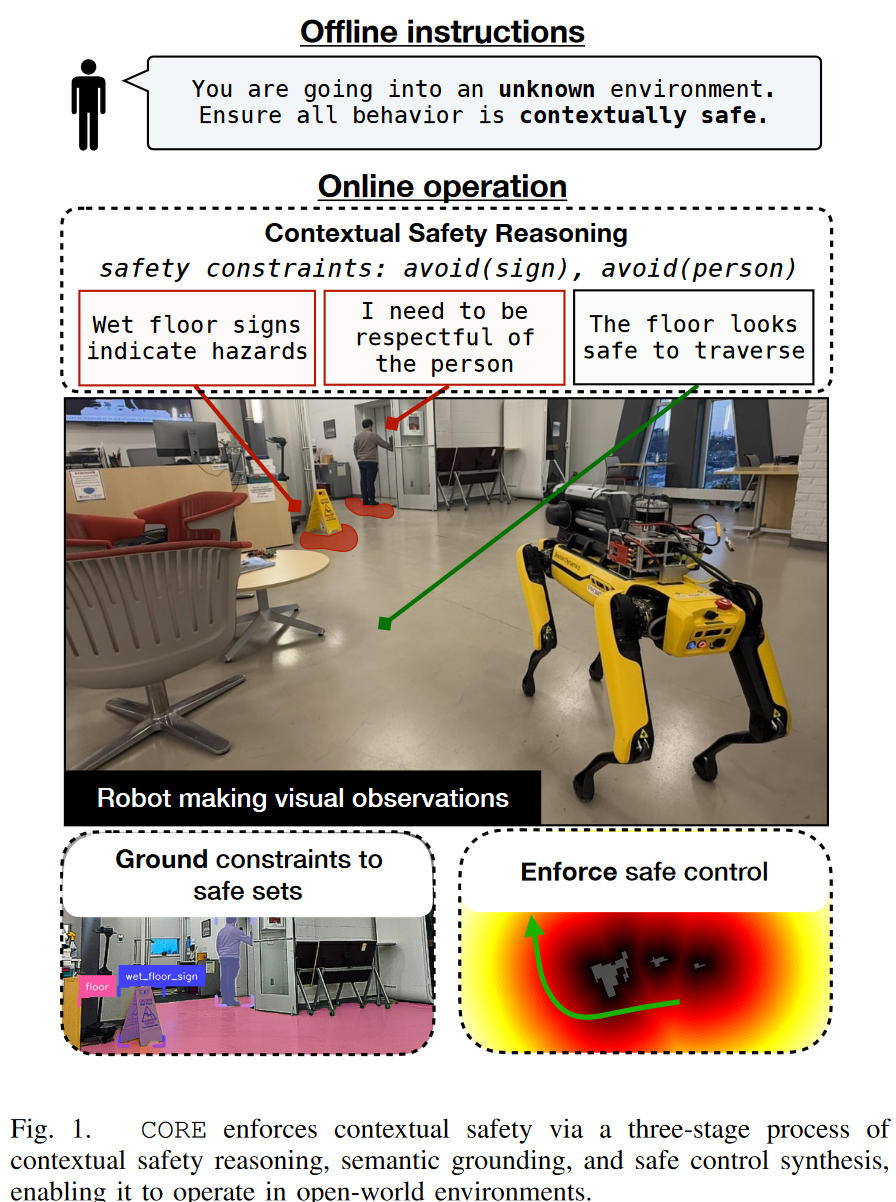
CORE利用视觉-语言模型(VLM)直接从视觉观察中持续推理与上下文相关的安全规则,将这些规则在物理环境中落地,并通过控制屏障函数执行由此生成的空间定义安全集。
解决:#
- 定义安全谓词(ON NEAR AROUND BETWEEN)对应安全逻辑联系VLM的语义类别 输出安全区域和不安全区域
- 图像空间安全区域→障碍空间 grid化,每个grid计算安全状态估计(根据图像安全观测+depth)→构造一个SDF来描述障碍
- SDF提供梯度+机器人动力学+CBF 证明安全性 感知不确定性建模(detection probability function)\(\underline{m}(\delta x):\mathbb{R}^3\mapsto[0,1]\)
一句话介绍解决challenge的key insight/motivation(insight和technical contribution不一样,insight是比较通用的high-level的思想)#
一句话介绍insight/motivation#
一句话介绍insight的好处(不一定要在这里说,因为如果后面要提technical contribution的话,还会再说technical advantage)#
介绍technical contributions#
一句话介绍technical contribution1#
一句话介绍technical contribution1的好处#
一句话介绍technical contribution2#
一句话介绍technical contribution2的好处#
🔬 Introduction#
Task and Application:#
Technical challenge for previous methods (围绕我们解决了的technical challenge展开讨论)#
Technical challenge1#
Previous method#
Failure cases (Limitation)#
Technical reason#
Technical challenge2#
Previous method#
Failure cases (Limitation)#
Technical reason#
介绍解决challenge的our pipeline#
一句话介绍key innovation/insight/contribution#
contribution1#
为了解决什么问题#
具体怎么做的#
讨论advantage/insight#
contribution2#
为了解决什么问题#
具体怎么做的#
讨论advantage/insight#
🚩 Method#
Overview#
具体任务及输入输出#
方法的大致步骤#
Pipeline Module1#
Motivation#
做法#
为什么work#
technical advantage#
Pipeline Module2#
Motivation#
做法#
为什么work#
technical advantage#
📌 Experiments#
Comparison experiments#
Ablation studies#
论文的core contributions以及一些重要的components对论文方法performance的影响#
列出每一个pipeline module中design choices对论文方法performance的影响#
🔬 Limitation#
需要给limitation做出合理的解释: 为什么我们方法有这样的limitation、改进?#